RS Lidar Preception
Manufacturer: Robosense
LIDAR Environment Perception Algorithms Hardware Unit fo Self-driving Vehicles at Medium-Low Speed
RoboSense's latest RS-LiDAR-Algorithms is built into RS-Cube, analyzing LiDAR's point cloud data in real-time in order to produce semantic-level environmental information for self-driving cars under any scenarios.
RS-Cube is an upgraded version of the RS-Box. The performance of the algorithms has been greatly improved with continuous update and iteration by RoboSense. The hardware computing platform is upgraded to the NVIDIA Jetson AGX Xaiver, which is more powerful and equipped with peak computing capability of up to 32 TOPS while supporting operations of two RS-LiDAR-16 plus one RS-LiDAR-32.
RS-Cube will accelerate your autonomous driving programs with more enhanced features and outstanding performance.
Product Brochure
RS-Cube-Brochure-EN.pdf
Perception Function Module
Obstacles Detection
Obstacles Classification and Recognition
Dynamic Objects Tracking
Freespace Detection

Multi-LiDAR Point Cloud Fusion*
Support UDP (Socket) & ROS Node Output
Recommended height for LiDAR installation: 1m - 2.5m above the ground
Perception radius: up to 60 meters (with proper installation and suitable LiDAR models)
Application scenarios: Outdoor medium-low speed driving (recommended speed: below 40 km/h, maximum 60 km/h)
*Users need to calibrate the LiDAR System before using the multi-LiDAR point cloud fusion function.
RS-Cube's Algorithms Advantages
• Al + Conventional Algorithms
• Optimized for NVIDIA CUDA and TensorRT
• Data-driven, multi-scene, large-scale point cloud data sets
• Over 10 years point cloud algorithm development experience
• Verified by 100+ partners and various testing scenarios
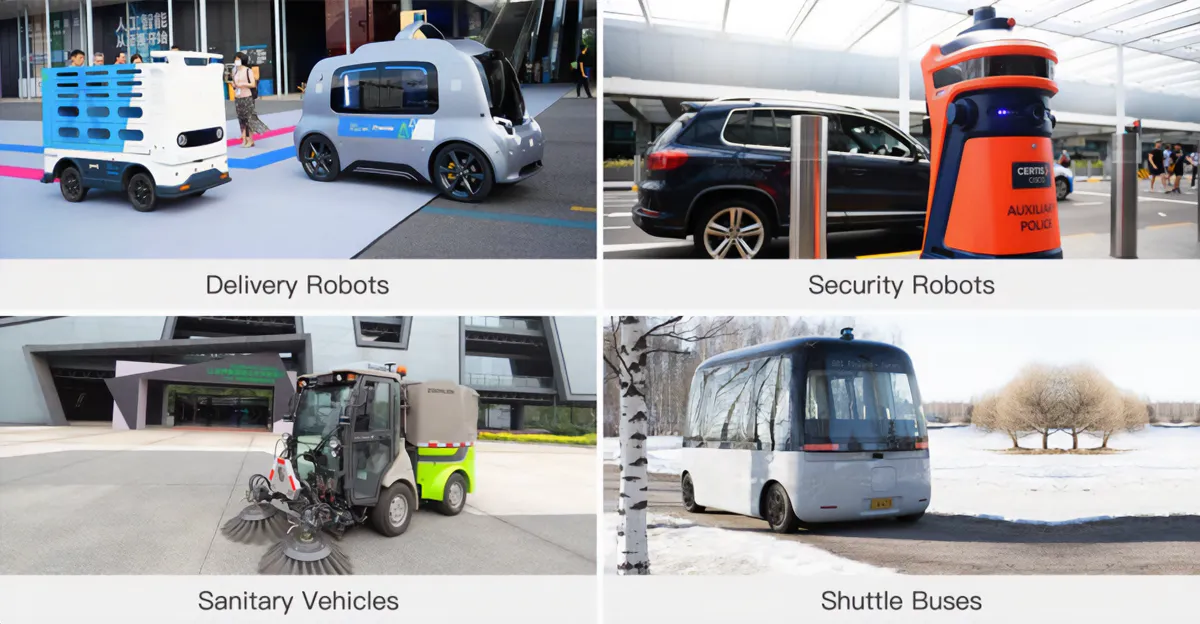
Applications